- 9,399

- United Kingdom
- neema_t
So I was watching this:
And I thought hey, maybe the G27 has a JTAG header or similar debugging interface, I wonder if it would be possible to have a poke around inside the microcontroller and see if there's any unused capabilities, I/O or similar?
The problem is I'm currently a long way away from my G27 so I can't have a look myself, so I'm wondering if any G27 owners either already know or could take a look at the microcontroller and let me/us know what the label on it says? Basically I need to know what's under the sticker that says "KS3" on the biggest black rectangle in this photo:
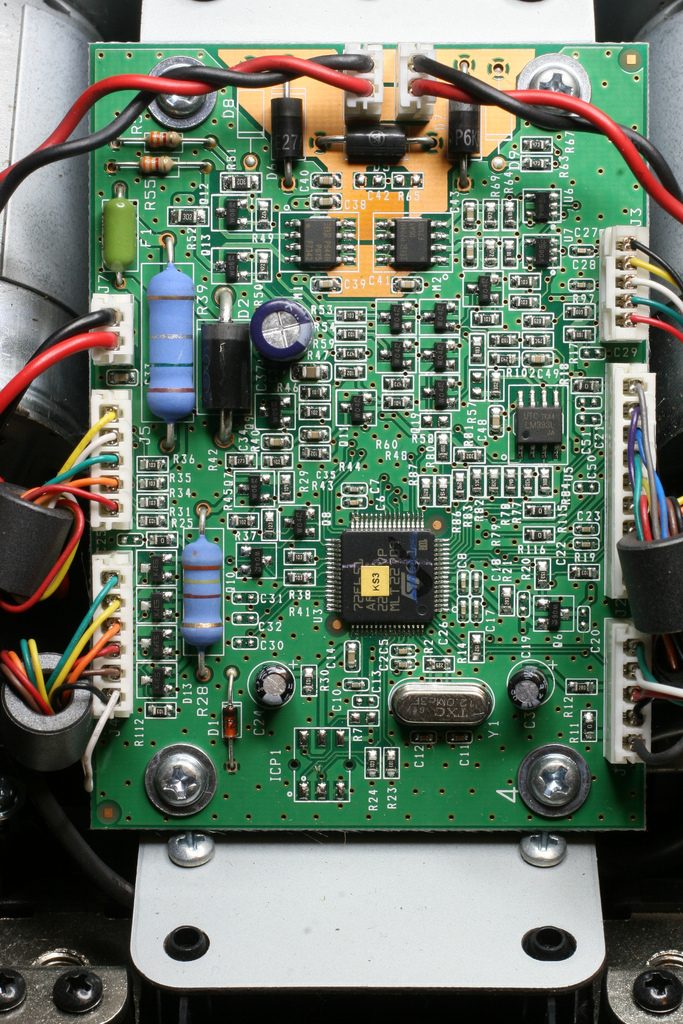
Maybe it's a dead end but that "ICP1" header at the bottom might be JTAG-compliant so it could be worth investigating...
Thanks!
And I thought hey, maybe the G27 has a JTAG header or similar debugging interface, I wonder if it would be possible to have a poke around inside the microcontroller and see if there's any unused capabilities, I/O or similar?
The problem is I'm currently a long way away from my G27 so I can't have a look myself, so I'm wondering if any G27 owners either already know or could take a look at the microcontroller and let me/us know what the label on it says? Basically I need to know what's under the sticker that says "KS3" on the biggest black rectangle in this photo:
Maybe it's a dead end but that "ICP1" header at the bottom might be JTAG-compliant so it could be worth investigating...
Thanks!
")
 But it has been done, just looks like nobody is willing to share the source code.
But it has been done, just looks like nobody is willing to share the source code.
")
