Well that's explained 20 times better than I ever could.

But how on earth would you ride straight with the bike leaned over? Whenever I lean I naturally turn, and if i tried to go straight with the lean, I'd naturally go upright again.
I might be getting this wrong, but what I meant with the low speed body movement was that you don't do much of it, because at low speed your body placement is very sensitive. So you don't move much to avoid falling over and breaking the rear brake lever (I've totally been there

), hence why I said minimal body movement. But at high speed you use your body and lean the bike in and yourself in to get through the turn.
Though it is quite likely that anyone else here who says they ride is more experienced than me, I've only been on the road for about a month.
Your body weight is very important, yes, it's a large proportion of the total weight. Moving your body moves the centre of mass, which affects the handling, naturally.
The issue is that the force you can put on the bike in the act of "leaning" (in order to steer around corners) will struggle to match the gyroscopic forces, keeping the bike upright. People have tried hanging off the bike with fixed bars, and it just wobbles and rights itself. My first quick right hander with a 21" front wheel was an event, I very nearly didn't go round. I'd been used to smaller wheels and low speeds, and didn't appreciate the importance of steering, nor did I really notice exactly how I was getting around corners - it just seemed to happen by "instinct". I still concentrate hard for fast corners, to make sure I remember to steer decisively and not just imagine leaning - I do most of my mileage at low speeds.
At low speeds, the gyroscopic force is greatly reduced, so you're right, you have to be more careful with position and moving. Stood up and at low speed, you can steer the bike on the footpegs, by applying pressure on one foot or the other, especially on slippery surfaces.
Regarding riding canted over, there's a small window where positioning your body to one side allows the bike to lean slightly the other way but still have your combined mass' centre directly over the tyre contact patches, and therefore you don't fall over. It's much more marked on a push bike, due to the greater mass ratio of the movable rider to the bike - the bike could be laid flat and picked up again (on a suitable surface, e.g. polished marble).
In terms of controlling a game, steering is king for circuit racing. Body position is important, but mainly for optimising centre of mass.
For low speeds, down to stationary (try balancing without moving, and you'll appreciate the footpeg thing), steering and body position matter.
Sadly, steering a bike is a bit counter intuitive (hence instinct usually taking over), so "lean" controls will dominate in games - but the physics engine will require the complex input described above. So you let an AI handle translating "desired lean angle" (and hence angular velocity) from the player's input into the necessary steering and body position inputs for the physics engine.
And this is, oddly enough, where we are with TT. For the handle bar controller concept, you're left with supplying raw steering input, and possibly body position. But steering is by far the more important control, and riders don't win or lose races based on their precise location on the bike, so much. So an AI can handle that, TT had a configurable rider position for different situations already.
")
There's an issue with pulling wheelies and stoppies, though... Also, riding off road, pumping the suspension is a useful technique for playing with weight distribution for various reasons, culminating in the pure technical riding in moto trials. That's quite a control challenge, but probably won't feature in a TT sequel anyway.


")
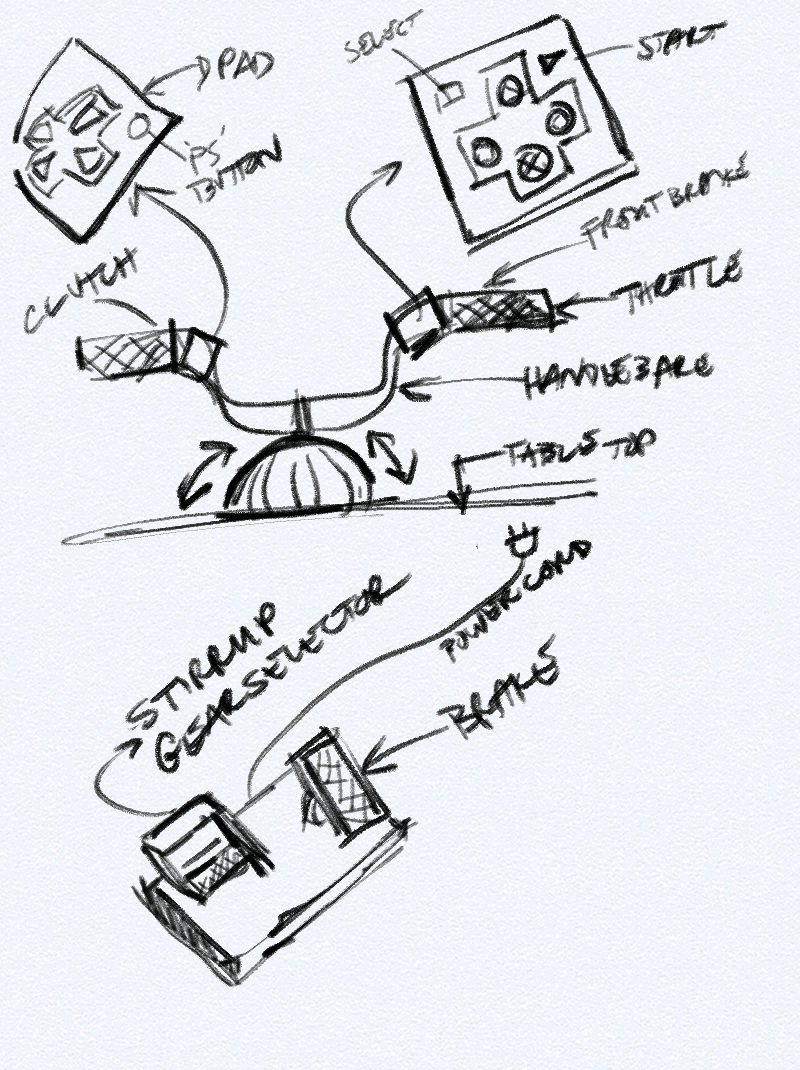
 ), allowing a 1:1 "steering only" mode would be interesting, even on the pad. In the case of a handle bar controller, the AI would be left in control of body position, unless a pressure pad could be utilised.
), allowing a 1:1 "steering only" mode would be interesting, even on the pad. In the case of a handle bar controller, the AI would be left in control of body position, unless a pressure pad could be utilised.
