I naively bought a used, broken T300 wheel to try and repair it as a companion to my T500RS.
As I don't have a T300 wheel I just fitted the T500 wheel for the moment assuming they're the same. Most of what I experience applies when the wheel is removed:
What's working:
What's NOT working:
Ideas, guides, links welcome!
My feeling is the main board is probably shot AND/OR the motor's position sensor is faulty.
Where is the rotational sensor?
What is the PCB mounted to the end (back) of the motor's axle?

Also, the fan runs constantly which I guess is good for cooling but may indicate a faulty thermostat?
As I don't have a T300 wheel I just fitted the T500 wheel for the moment assuming they're the same. Most of what I experience applies when the wheel is removed:
What's working:
- Wheel powers on when USB connects (internal PSU apparently OK)
- Windows driver installed and recognises wheel
- Firmware Update apparently successful
- Red mode light appears
- Tension of belt looks decent after adjusting
- Cables int/ext look sound
What's NOT working:
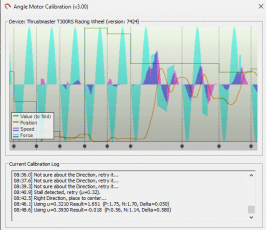
- Wheel calibration routine kinda lamely runs through but not convincingly fast as compared to T500
- Control Panel does not detect angle of wheel
- Control Panel cannot apply any Force Feedback actions
- No buttons react in control panel
- Wheel kind jerks pathetically when turned
Ideas, guides, links welcome!
My feeling is the main board is probably shot AND/OR the motor's position sensor is faulty.
Where is the rotational sensor?
What is the PCB mounted to the end (back) of the motor's axle?
Also, the fan runs constantly which I guess is good for cooling but may indicate a faulty thermostat?


")