Not sure what you mean MOK water cooling ends cooling woes for the most part.
After that, simplify and add bling.

Hmm, I just did a few little tests after setting up my new power supply, stall tested the Bühlers in parallel and singularly and then the Fana-Buchis. Interestingly, when holding the Fanas at stall @24VDC but slowly rotating the motor's shaft, they felt very jumpy/notchy, while the Bühlers felt like a perfectly constant smooth force. I also brought the motors up slowly from 0-30VDC under no load, just to listen. The Bühlers were smooth and quiet, but the Fanas were really acting odd. They were quiet for a certain amount of voltage change, then there would be a big jump in volume level for a certain range of voltage, then quiet for awhile, then a big jump, then quiet, etc. Sort of like it was fighting to build RPM, then jumping with a big increase, then fighting, then jumping, etc. These are brand new Fana motors too, never been in a wheel at all.
Today, 4:06 PM #221
MissJoan New Member
Cogging occurs when the armature poles align magnetically with the magnet poles in the motor. In a motor with a straight slotted armature, the poles will align in definitive location with relation to the magnets. In a motor with a skewed armature, these poles will be spread across the magnets causing the torque maximum to be "smoothed" All else the being the same, it is likely this has the side effect of decreasing the overall maximum torque output of the motor when compared to a similar straight slotted counterpart.
If you want to look more into the concept of skewed armatures you can just google that, there is a lot of information on it's use in overcoming reluctance torque (cogging).
That's because the Fana-Buchis™ were intimidated by your Killer Bees. After that test they sat there and peed themselves. Can I say that?

That is good info, but how sure are you that's what it was? It didn't feel at all like the other 5 pole straight armature motor I tested (although as I said, it's a bit smaller).
If I could recommend a process to you, it would be to clean your Mabuchi motors well and break them in. Then test again.
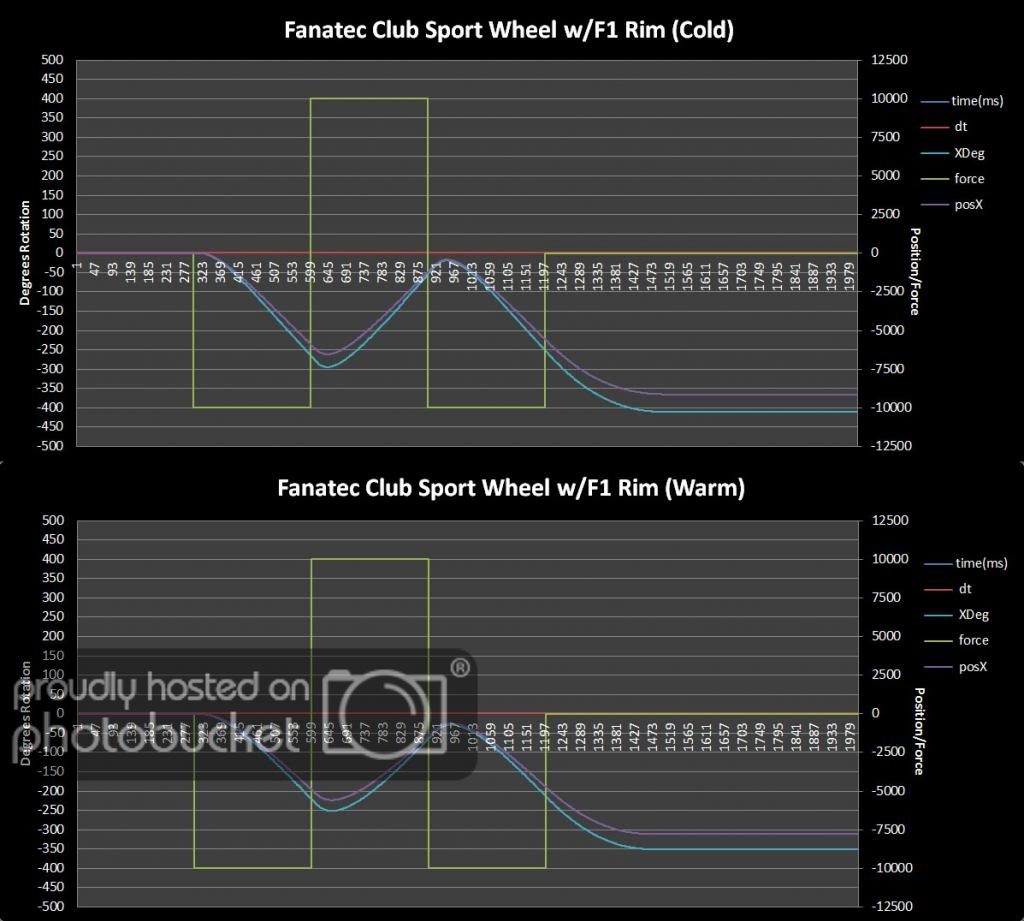
While the motors are free to move about, you should consider establishing baseline measurements of their efficiencies at different heat levels. I am somewhat surprised that this has not been done yet and/or posted.
It would be a good idea to establish what impact heat has on the motor itself and not only the circuitry through which it is being driven. Motors that are inefficient can experience significant decreases due to heat, especially in areas of the motor which cannot be directly cooled such as the armature.
I hope you do not mind my insight into these processes. Experiments by laypersons in such fields are quite interesting as the processes used often vary greatly.
Hey eK, make sure you measure your black stamped steel motor mount bracket. Don't be surprised if it is off more than expected, mine was. With some minor rework or shimming, mine can be square, even, and true to the world.
Also consider ditching the stock all-threaded motor mount to aluminum plate allen bolts. The ones for setting motor belt tension. Their threads can dig into the sides of the slots in the aluminum plate. Personally I despise lock washers so those mysteriously vanished too. Instead use bolts (or even better, studs) that are unthreaded for at least part of where they pass through the main base plate. Maybe add a slight countersink to the beginning of the threads in the motor mount brackets too. To avoid any thread pull-out if you stay with bolts. Two of mine have some thread pull-out which can affect how they lay on the flat plate. A bit sloppy as delivered, but easy to tidy up.


👍.
On another note, mrbasher has had a discussion with me over PM and sorted out a few issues ..snip... So hopefully we'll get some T500 comparisons and notes as well.
")
RacerXXThey may not make your teeth whiter and day happier. You lose brush wear and friction and they can run cooler. But many BL motors seem to be unhappy when run near stall (0 rpms) and of course their controllers are more complex and some software/firmware changes may be needed. The RC guys just gear down when they go brushless for instance.
Sim wheels could be geared down too but notice the trend in higher end wheels…lesser use of gear ratio to boost torque, which has subjective feel benefits. So if a Fanatec CSR is at about 36:1 and a CSR-E around 20 and a Bodnar at 1:1 (wheel shaft = motor shaft) that is kind of interesting isn't it?
You could also just use a larger BL motor to make up for any stall torque deficits. But the Physics VS Economics relationship seems to favor brushed motors in the mainstream sim wheel products. And going larger would raise BL sim wheel pricing.
There are higher end brushed motors with 15-25,000 hour life expectancies too. Part of the woes we see on many sim wheels are that they use motors with a lowish expected lifetime in the first place, per the motor makers. Most Mabuchis are rated at 20-300-2000 hours for instance.
Back to stall RPMs. Most brushed motors are not intended to be used at that RPM range. Many brushed motor makers like to see RPMs over 1000 in order to keep the commutator slots clean. We never see anything close to 1000 RPMs. And we use the smallish motors at a large percentage of their stall torque. If one rule of thumb is not to exceed maybe 15% of the stall current…well ALL consumer sim wheels blow way past that figure. Our motors are being run hard and put away wet as the saying goes. No wonder some act up! And no wonder why no mainstream wheels provide enough FFB torque (IMO) nor can any of the stronger ones run without some fade. Some fade quite significantly in use.